
{kind=link}

- What is a line follower?
Line follower is a machine that can follow a path. The path can be visible like a black line on a white surface (or vice-versa) or it can be invisible like a magnetic field.
- What is the need to build a line follower?
Sensing a line and maneuvering the robot to stay on course, while constantly correcting wrong moves using feedback mechanism forms a simple yet effective closed loop system.
When a sensor is on the black line it reads 0 and when it is on the bright surface it reads 1.


- When left sensor comes in white(for black line tracer) region then right motor stops while left motor continue to move so that right turn takes place and robot returns on white line.
- First sensor which is to the right will become low as that sensor will be facing the black line and the remaining sensors response will be high. i.e. the right wheel is held constant and the left wheel is made to move freely until the response from the middle sensor becomes low .
- When right sensor comes in white region then left motor stops while right motor continue to move so that left turn takes place and robot returns on white line.
- The middle sensor will always be on the line and as the line is black in color, it will not reflect the emitted radiation back and the response of the sensor will be low and the response of the remaining two sensors will be high as they will be on the bright surface. When both sensors are on black line then robot moves forward.
- If all the three sensors will be on brighter surface then they all will be high and as no line is detected , robot move in a circular motion until line is found.
L293D Module:

Components needed:
- L293D
- Arduino
- connecting wires
- Battery
- Bread board
- motor
- Wheel
- Chases
- Connecting screws
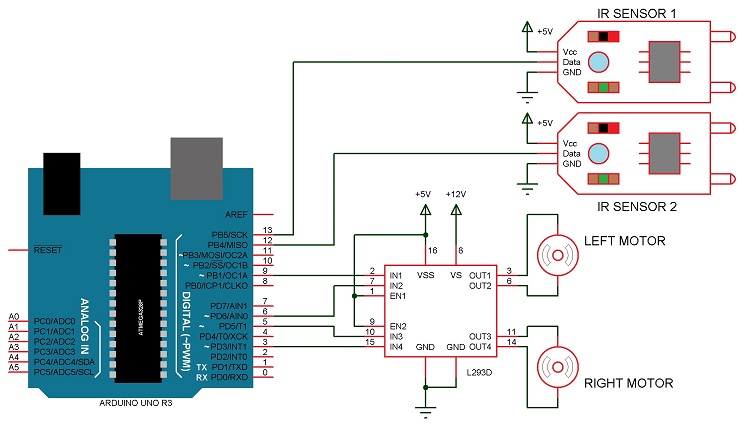
Schematics:
For arduino Code:
click here:
For more details contact:
parameshmech061@gmail.com
Comments
Post a Comment